 中文
中文 ENG
ENG

小优智能科技有限公司成立于2015年底,是一家专注于高精度3D机器视觉模组研发、生产及销售的高科技企业。
公司自主研发的3D机器视觉模组采用激光/DLP白光编码光栅结构光+双工业相机方案,还原物体三维信息,广泛应用于消费电子领域、工业领域和安防领域,具有精度高、速度快、成本低的优势。


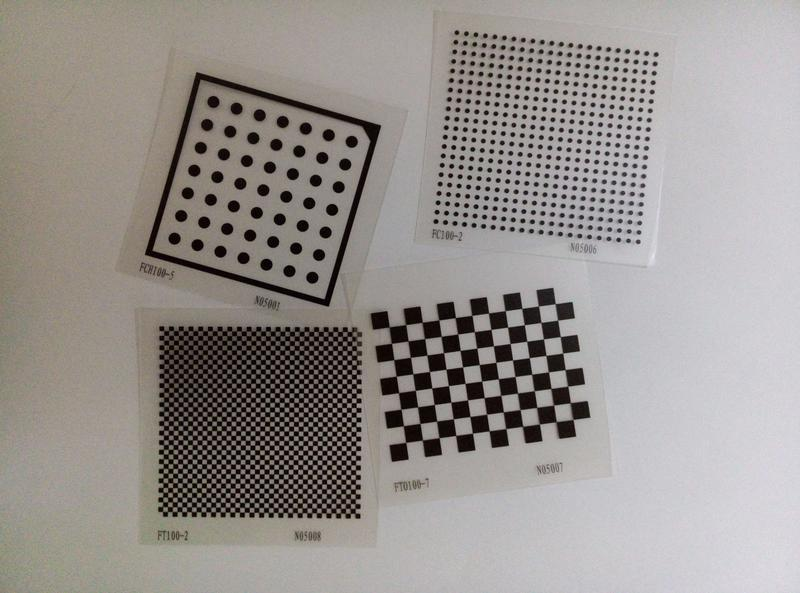
According to the pattern of calibration plate, it can be divided into three types: checkerboard calibration plate, dot calibration plate and Charuco calibration plate.An important consideration in selecting any kind of calibration plate is its physical size.This is related to the final applied measurement field of view (FOV).This is because the camera needs to be calibrated at a specific working distance.For accurate calibration, the calibration plate needs to fill a large area when the camera is in the field of view.As a rule of thumb, when viewed from the front, the area of the calibration plate should be at least half the available pixel area.

Confirm the performance of the optical system and restore the one-to-one correspondence between 3D space and 2D space of the camera model.Checkerboard calibration is based on gray image corner detection, corner detection based on binary image corner detection, corner detection based on contour curve.Corner is a very important feature of image, which plays an important role in the understanding and analysis of image graphics.Corner detection algorithms of gray image, binary image and edge contour curve are analyzed and evaluated.This is the most commonly used pattern scheme.Candidates for checkerboard corners are usually found by first binarization of the 3D vision camera image and finding quadrilaterals (black checkerboard regions).The filtering step preserves only those quadrilaterals that meet certain size criteria and are organized in a regular grid structure whose dimensions match those specified by the user.Corner position can be determined with very high precision after the preliminary detection of the calibration plate.This is because angles are essentially infinitesimal and therefore unbiased under perspective transformation or lens distortion.
In OpenCV, the entire board must be visible in all images to be detected.This often makes it difficult to extract information from the edges of an image.These areas are usually a good source of information because they properly constrain the lens distortion model.After the checkerboard has been detected, sub-pixel refinement can be performed to find points with sub-pixel accuracy, which takes advantage of the exact grayscale values of the pixels around a given corner position and is much more accurate than the accuracy allowed for integer pixel positions.An important detail about the goal of the checkerboard is that in order to keep the rotation constant, the number of rows must be even, and the number of columns must be odd, or vice versa.For example, if both are even, there is an ambiguity about a 180-degree rotation.For calibration with a single camera, this is not a problem, but if the same point needs to be recognized by two or more cameras (for stereoscopic calibration), this ambiguity must not exist.This is why our standard checkerboard objects all have even/odd row/column properties.
2、Dot calibration plate
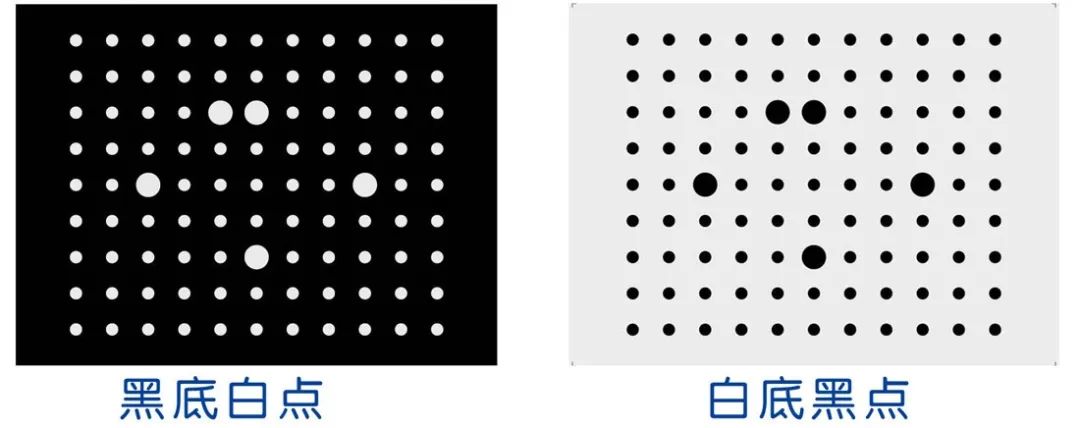
Dot calibration plate is also a very common pattern scheme of calibration plate.It comes in either a black circle on a white background or a white circle on a black background.In image processing terminology, a circle can be detected as a "speck" in an image.Some simple conditions, such as area, roundness and convexity, can be applied to these binary spots to remove the candidate bad feature points.
After finding the suitable candidate object, the pattern is recognized and filtered again by using the rule structure of the feature.The determination of the circle can be very precise because all the pixels around the circle can be used, reducing the impact of image noise.However, unlike the dark dots on a chessboard, the circles are imprinted as ellipses when viewed from a camera's perspective.This view can be explained by image correction.However, unknown lens distortion means that the circle is not a perfect ellipse, which adds a small bias.However, we can think of the distortion model as piecewise linear (subject to perspective transformation/homography), so in most lenses this error is very small.
3、CharuCo calibration plate
In the conventional calibration process, checkerboard calibration board (Zhang Zhengyou) is used. Each corner of the checkerboard pattern is surrounded by two black squares, which can be refined more accurately. However, the checkerboard has a problem, that is, it cannot be occlusion, and must be fully visible.Aruco boards have fast detection and versatility, however, one of the problems with Aruco markers is that even after subpixel refinement, their corner positions are not very accurate.Therefore, in conclusion, Charuco board combines the two, as shown in the figure below:

The Charuco board overcomes some of the limitations of traditional chessboards.However, their detection algorithms are a bit complicated.Fortunately, the Charuco check is part of the OpenCV Contrib library (as of OpenCV 3.0.0), which makes integrating this advanced method very easy.
The main advantage of Charuco is that all the light checker fields are uniquely encoded and identifiable.This means that even partially occluded or non-ideal camera images can be used for calibration.For example, intense ring light may produce uneven illumination (semi-specular reflection region) on the calibrated target, which will cause normal checkerboard detection to fail.With Charuco, the remaining saddle point detection can still be used.Saddle point localization can be refined using subpixel detection like a checkerboard.This is a very useful property for viewing areas near the corners of the image.Because the target is positioned so that only a part of it is visible to the camera, information can be gathered from the edges and corners of the camera's image.This usually results in very good robustness when determining lens distortion parameters.


