中文
中文 ENG
ENG

小优智能科技有限公司成立于2015年底,是一家专注于高精度3D机器视觉模组研发、生产及销售的高科技企业。
公司自主研发的3D机器视觉模组采用激光/DLP白光编码光栅结构光+双工业相机方案,还原物体三维信息,广泛应用于消费电子领域、工业领域和安防领域,具有精度高、速度快、成本低的优势。


When we talk about 3D vision application solutions, first of all, we need to understand the classification of optical measurement and its principles.

Optical measurement is divided into two types of ranging methods, one is active and the other is passive. The active ranging method requires a specific, human-controlled light source and sound source to illuminate the object being measured. We obtain the three-dimensional information of the object based on the surface reflection characteristics, optical and acoustic characteristics of the object. The active ranging method is mainly divided into three types: (1) structured light method (2) triangulation ranging method (3) time of flight method; the passive ranging method is mainly binocular stereo vision measurement.
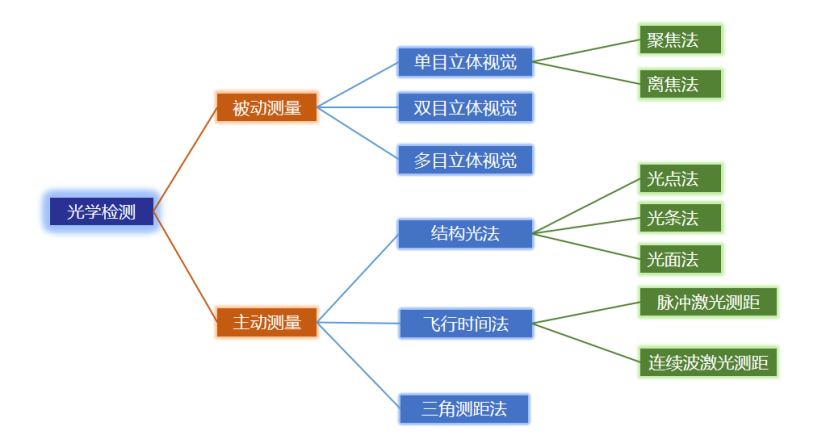
1. Active ranging method
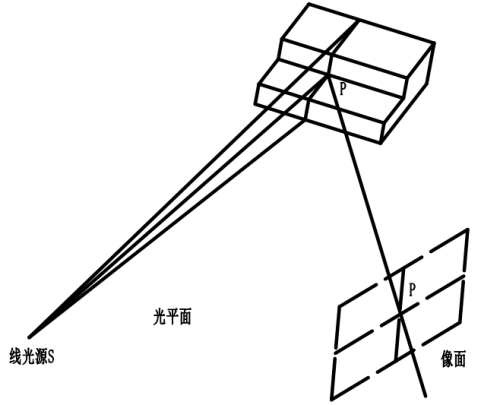
(1) Structured light method: Project various patterns of line structures onto the object to be measured.
Through the geometric relationship between the grating reflected by the object to be measured and the
reference grating, the height difference and depth information between each measured point can be obtain
ed through analysis.
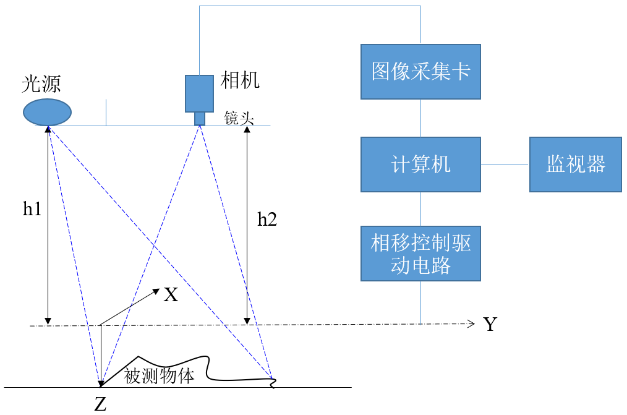
(2) Triangulation distance measurement method: Based on the principle of optical triangulation, we determine the three-dimensional coordinates of each point of the spatial object according to the geometric imaging relationship between the object, the light source and the detector.
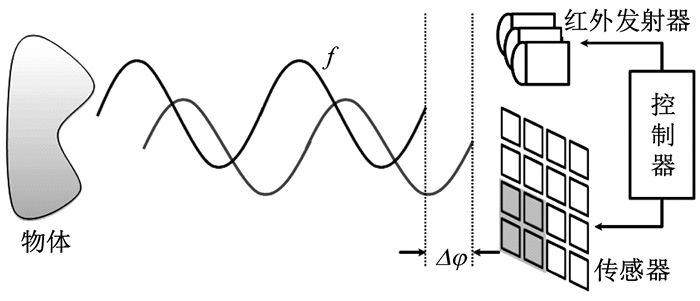
(3) Time of Flight (ToF): A pulsed laser signal is irradiated onto the surface of an object. The reflected signal is transmitted back along almost the same path to the receiver. The time difference between the emission and reception of the pulsed laser signal can be used to measure the distance of each pixel on the measured surface.
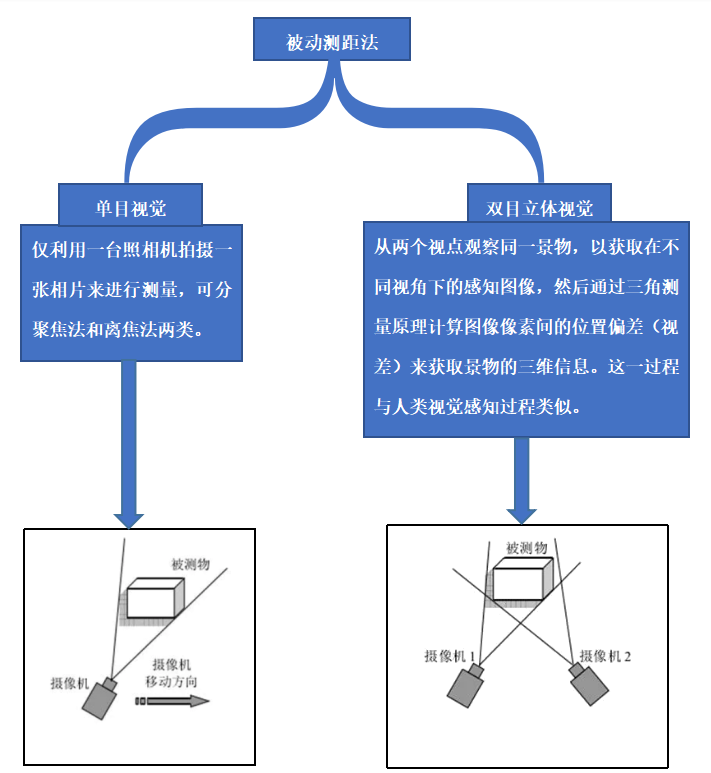
2. Passive ranging method
Passive ranging: The radiation source does not need to be set up by people. It reconstructs the
three-dimensional information of the scene through the two-dimensional image under natural light. Its
characteristics are: low cost, flexible implementation method, and strong adaptability.