 中文
中文 ENG
ENG

小优智能科技有限公司成立于2015年底,是一家专注于高精度3D机器视觉模组研发、生产及销售的高科技企业。
公司自主研发的3D机器视觉模组采用激光/DLP白光编码光栅结构光+双工业相机方案,还原物体三维信息,广泛应用于消费电子领域、工业领域和安防领域,具有精度高、速度快、成本低的优势。


There are two general methods for single-purpose structure cursor setting: 1. Use the projector as an inverse camera, 2. Model the projector as a new model, we introduce the second method first.
In this method, the projector is modeled as a new model (reverse pinhole model), and the calibration of the projector is directly simplified to the calibration of 8 unknown parameters. The specific calibration steps are as follows:
1. Fix the camera and projector at an appropriate Angle and ensure that they are relatively stationary during calibration
2. Prepare calibration plates. Printed calibration plates can be used, or ceramic calibration plates can be used
3. The projector is off and the camera takes pictures of the calibration plate
4. The projector projects multi-frequency phase-shift pictures (only Y-direction stripes are projected), and the camera shoots at the same time
5. Change the position and pose of the system relative to the calibration plate, repeat Step 3\4, shoot >;15 sets of data
6. Cameras were calibrated by using the pictures of calibration plates, internal and external parameters of the camera were obtained, and corner position information of each calibration plate was saved
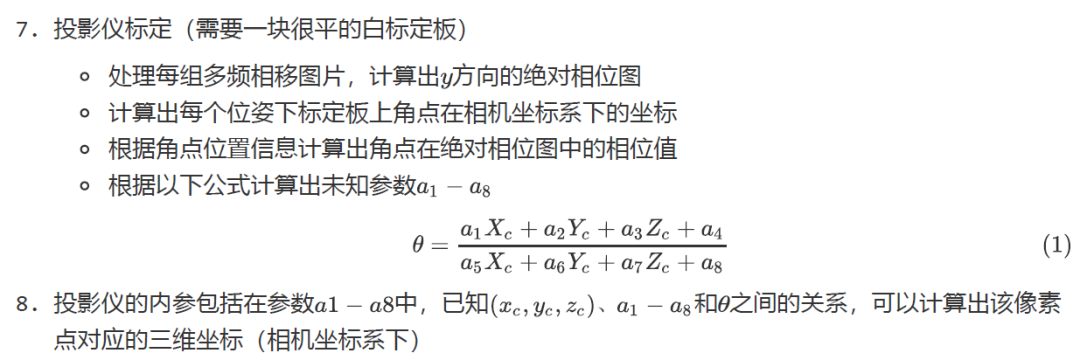
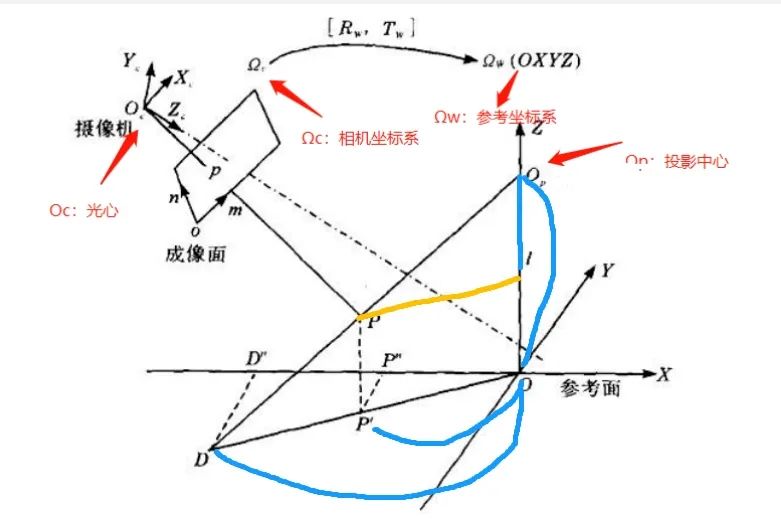
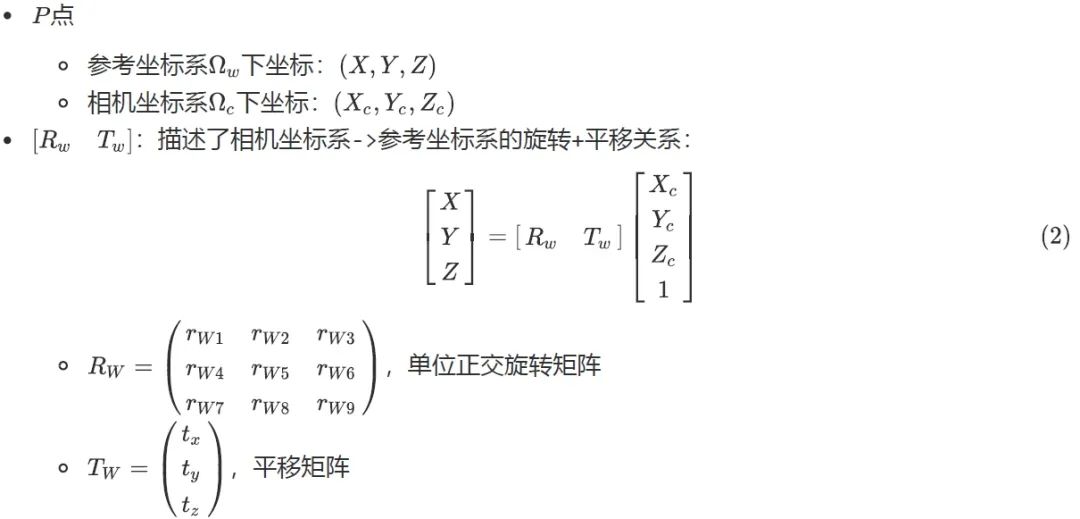
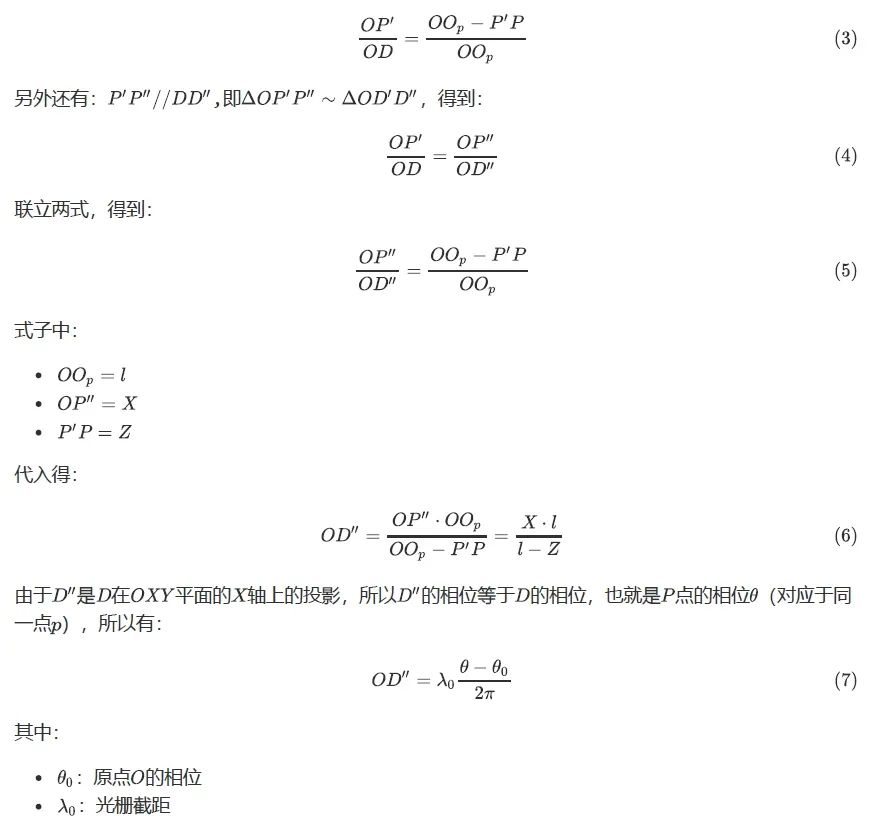
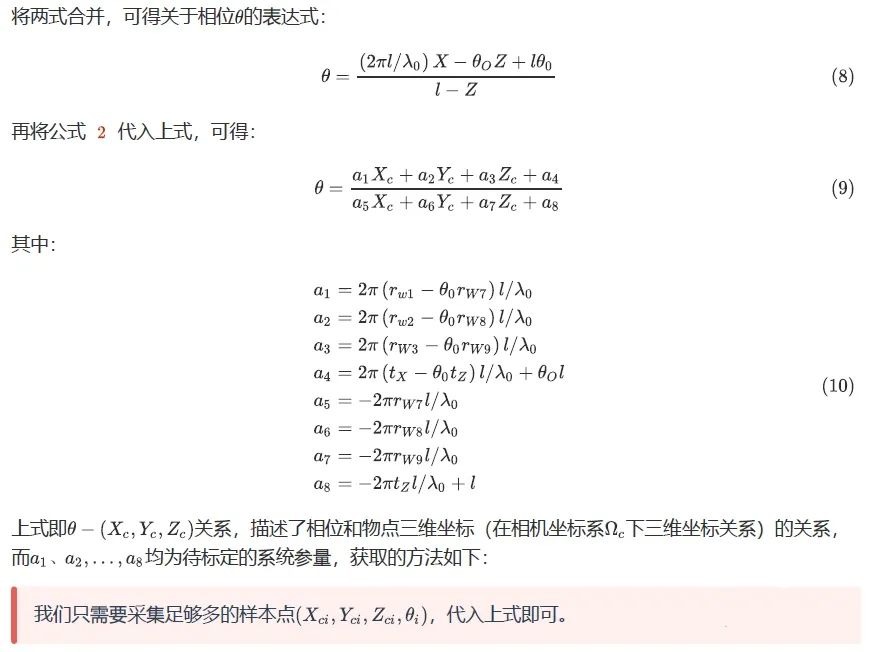
标定模型如下所示:

本文仅做学术分享,如有侵权,请联系删文


